Jiangsu University
Chao Wenbo Zhang Xueyuan Meng Zhongtao Zheng Lu
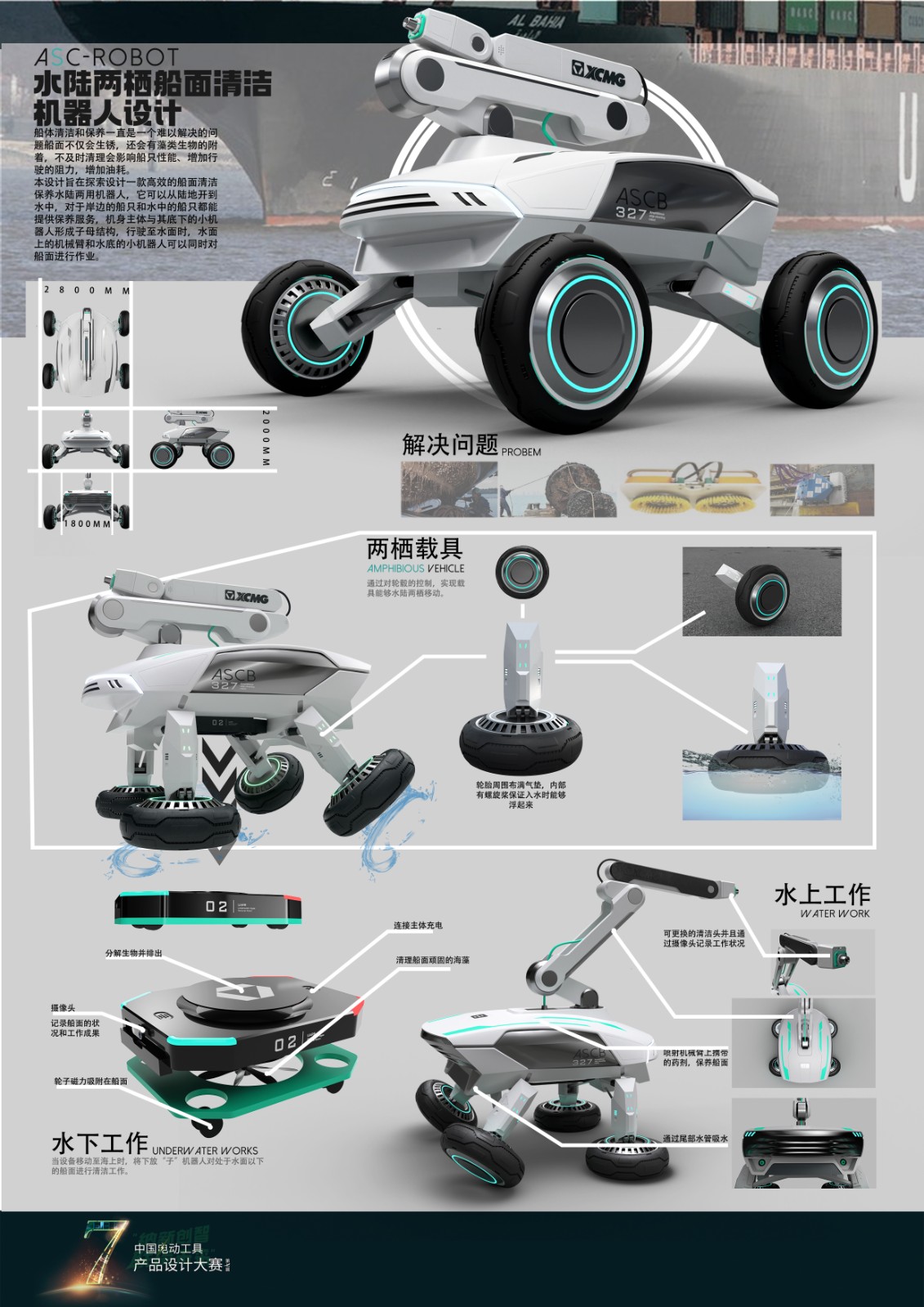
Hull cleaning and maintenance has always been a difficult problem to solve. The ship surface will not only rust, but also the attachment of algae. If it is not cleaned in time, it will affect the performance of the ship and increase the resistance of driving. There are also various ship surface cleaning robots on the market, but most of them need manual operation or delivery, and the entire cleaning service system is not perfect. This design aims to explore the design of an efficient surface cleaning and maintenance amphibious robot, which can be driven from land to water and provide maintenance services for ships on shore and ships in water.
1. Land operations: use mechanical arms to directly maintain and clean ships docked on the shore. 2. Surface operation: From the land form of water, the robot automatically changes the form and moves to the vicinity of the ship. The main body of the fuselage and the small robot under it form a sub-mother structure. When driving to the water surface, the mechanical arm on the water surface cleans the ship surface, including rust removal, polishing, and protective agent; the robot will also put a "sub-robot", which will dive into the water., Clean the part of the ship's surface soaked in the water all the year round, including algae removal, reef removal and other substances. His electricity will also be provided by the mother robot.
本作品版权归 中国电动工具设计大赛 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。

新用户?创建账号
登录 重置密码
请输入电子邮件以重置密码。




留言板 (0)
评论为空