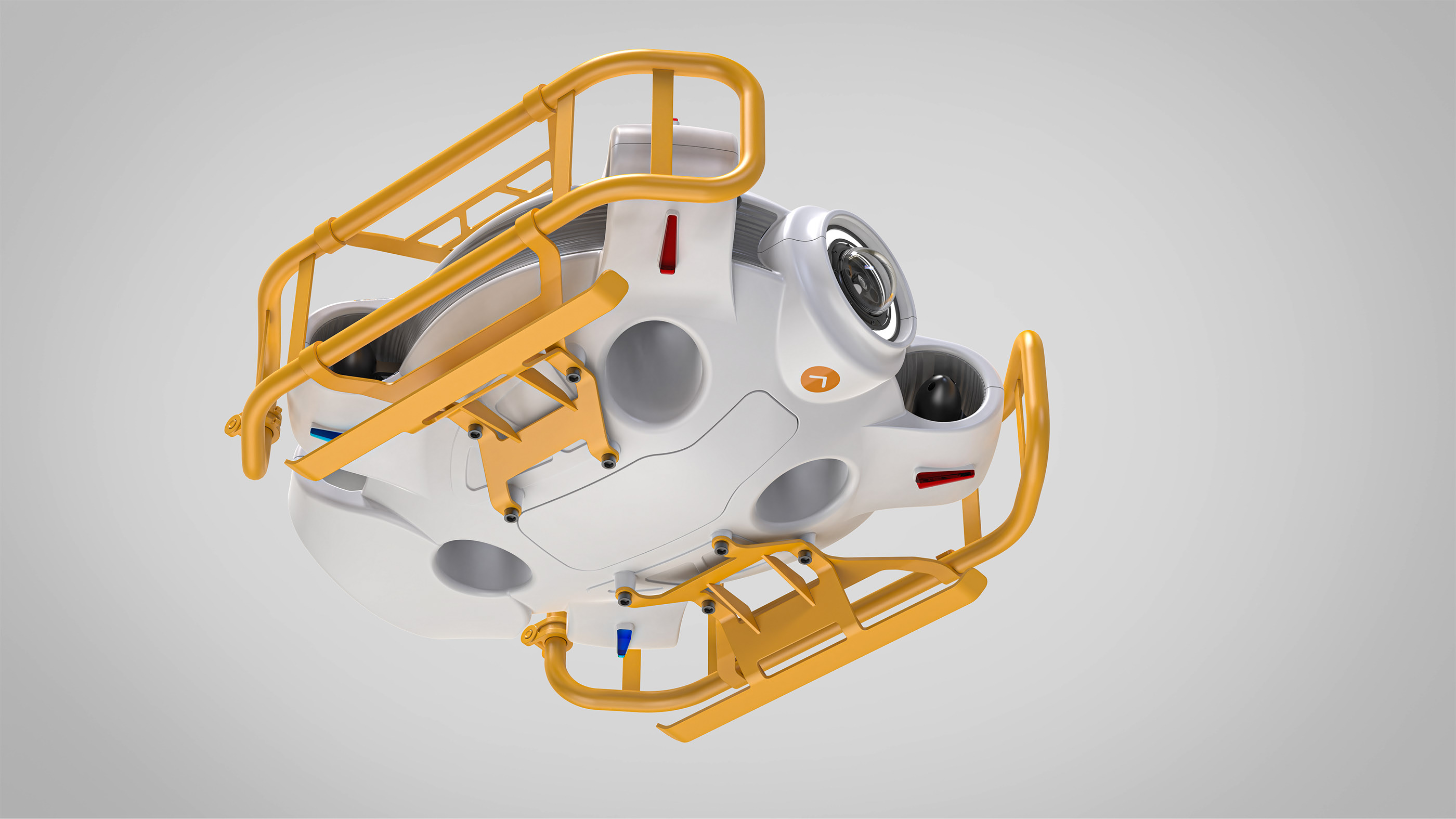
The "sea aid" modular underwater rescue robot is designed and developed to meet the needs of marine and offshore rescue. The design concept is based on the consideration of uncertainties in marine rescue, so the modular design is adopted. The tool module of the robot can be expanded as needed, and the host computer has reserved a number of modular interfaces to facilitate the increase of multi-functional applications. It can be set up independently in the rescue command room of the offshore rescue center and stand. In emergency rescue tasks, multiple tool kits can be installed on site as needed, quickly arranged, and the effectiveness of rescue equipment can be fully utilized.
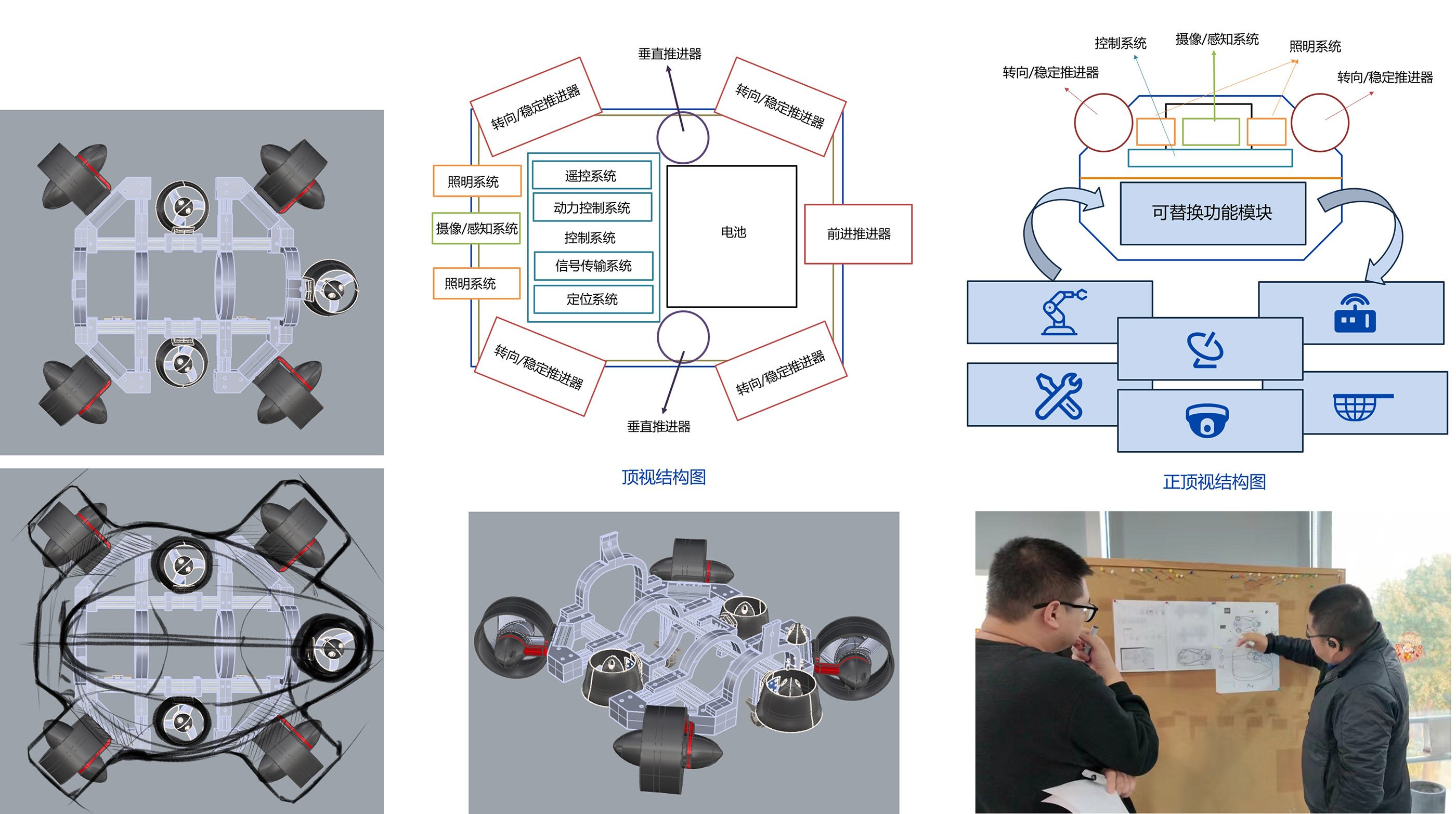
In order to solve the problem of power loss caused by steering when the traditional four-point horizontal layout is advancing at full speed, we adopted the arrangement scheme of four-point horizontal direction and three-point vertical propeller, and innovatively designed the propulsion mode of variable steering rudder. This design allows the product to reach the target point at full speed and quickly convert to a precise control state, improving the operational performance of the robot.

"HAIYUAN" modular underwater rescue robot









本作品版权归 李铁彬 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。

新用户?创建账号
登录 重置密码
请输入电子邮件以重置密码。




Can I borrow the works of big brothers as a quick solution?
High-tech.
Is it to find the target and then go to the rescue?
It's not easy
Excellent
This is awesome.