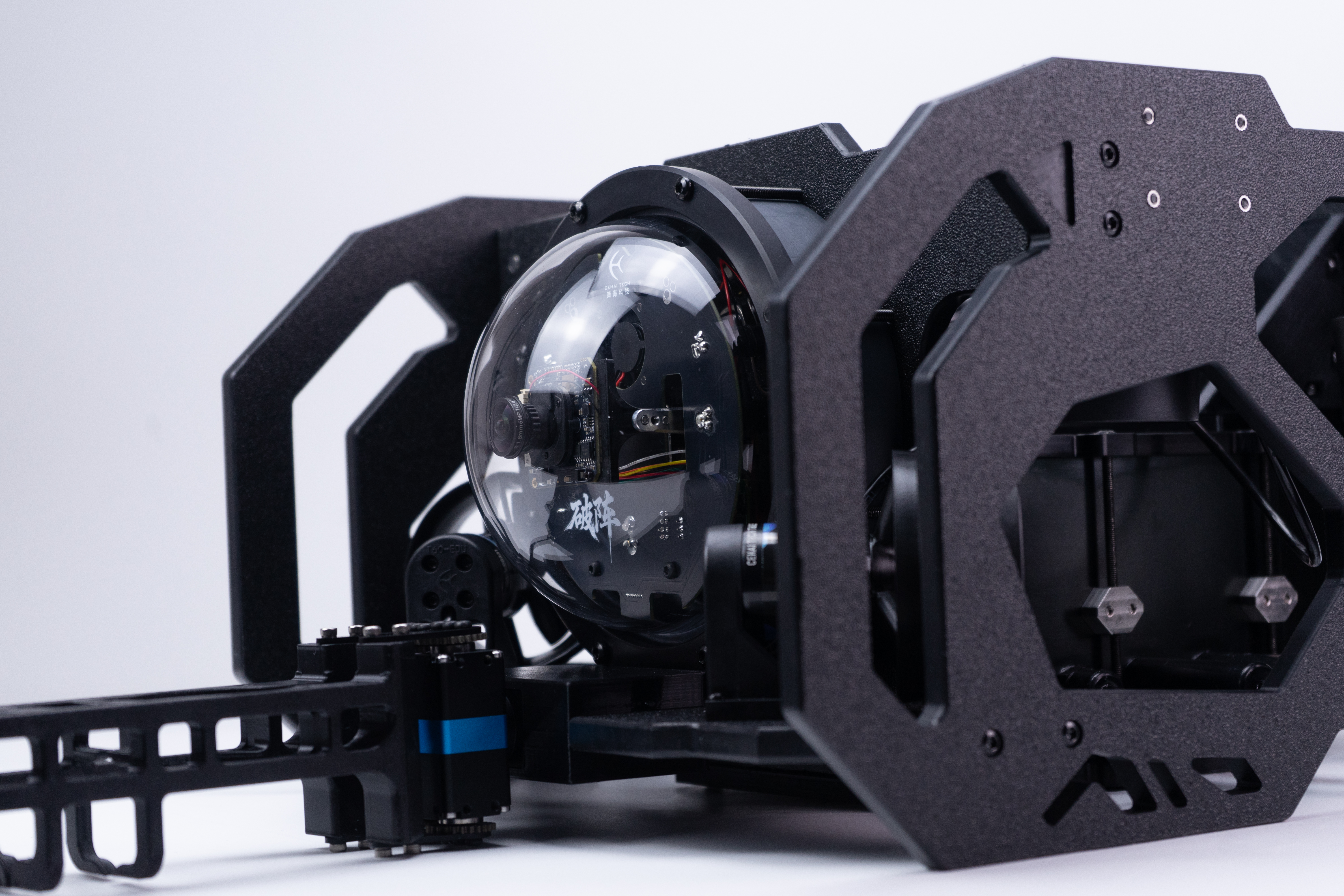
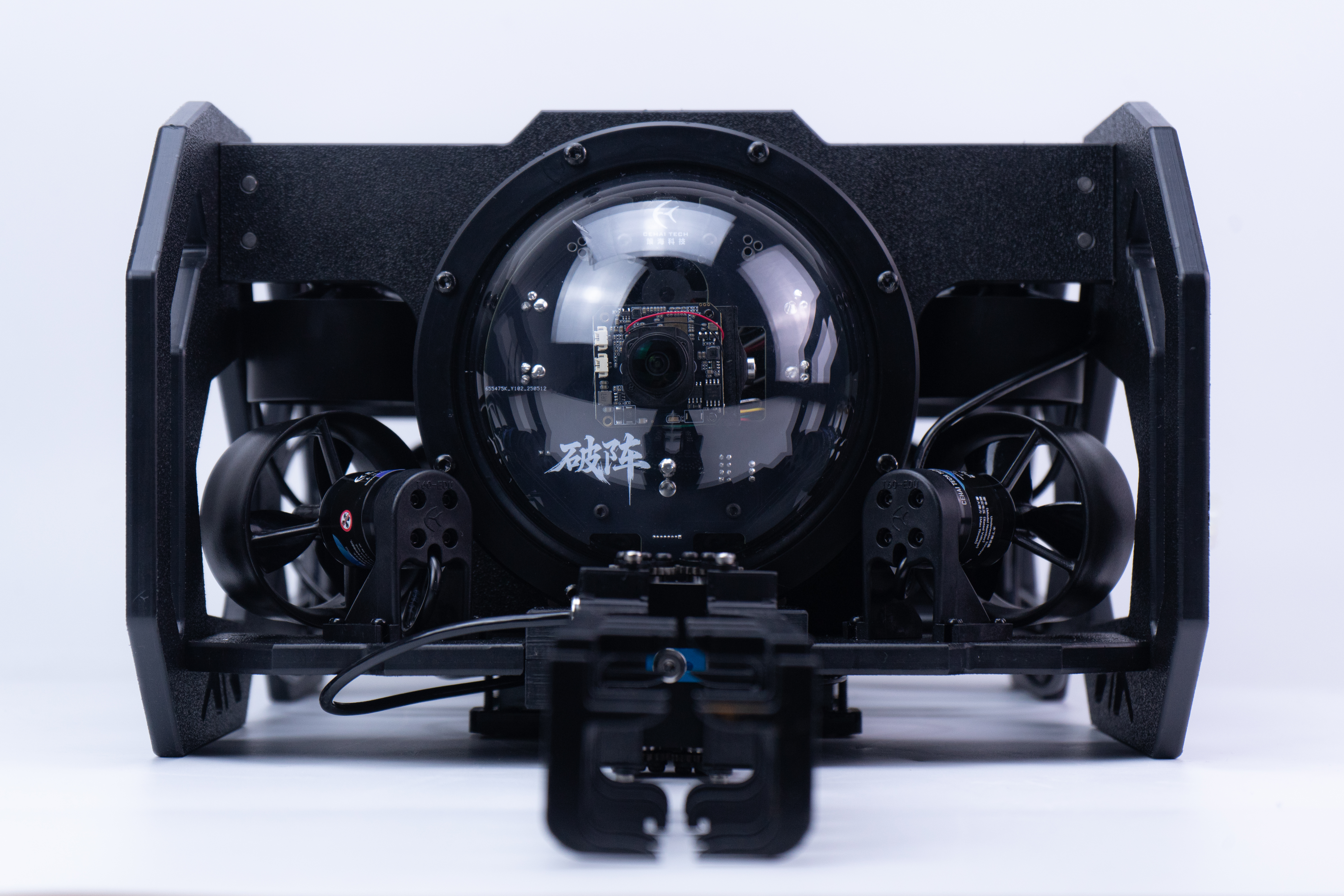
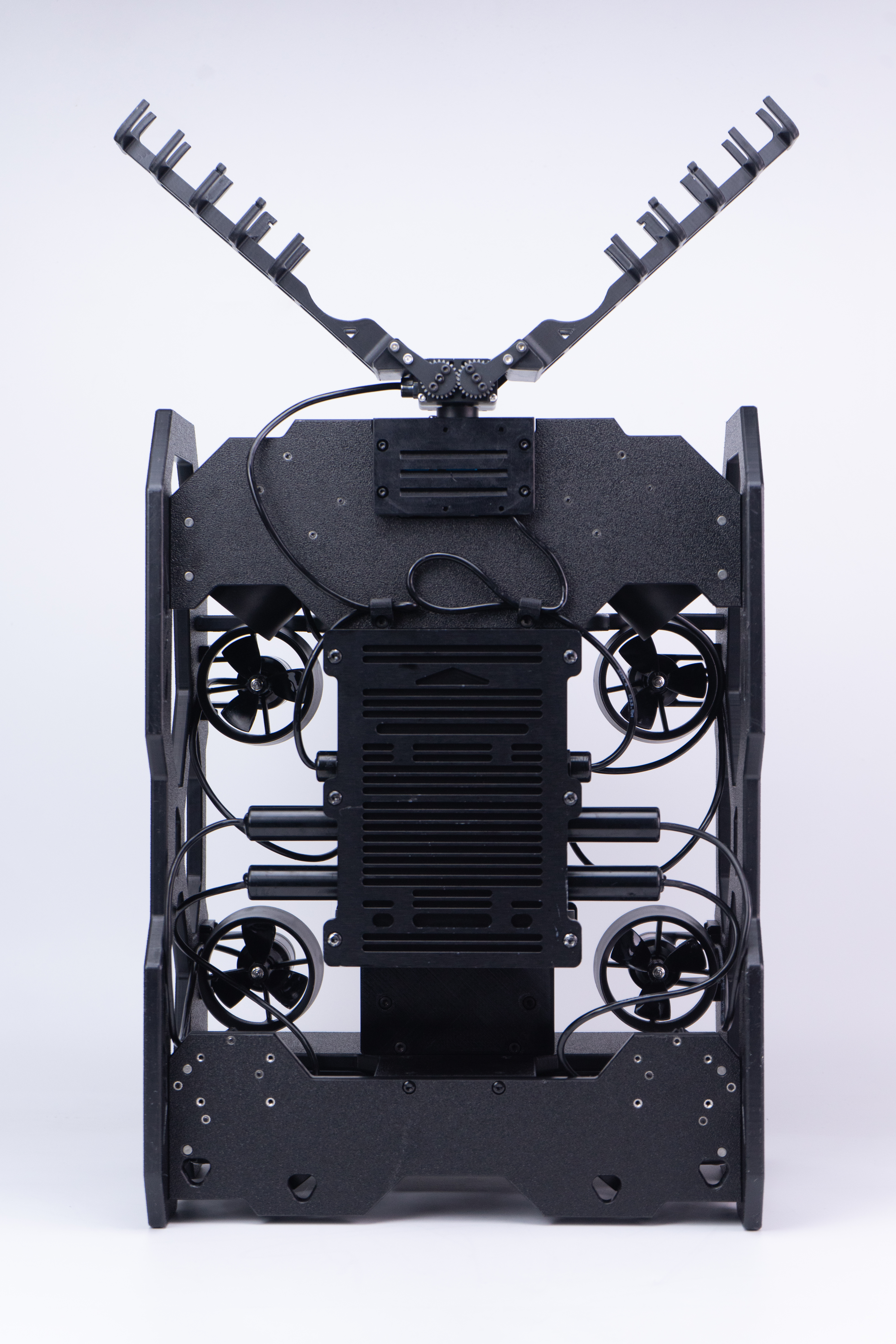
Broken array (Challenge) underwater robot can meet the underwater robot teaching, competition and scientific research purposes.
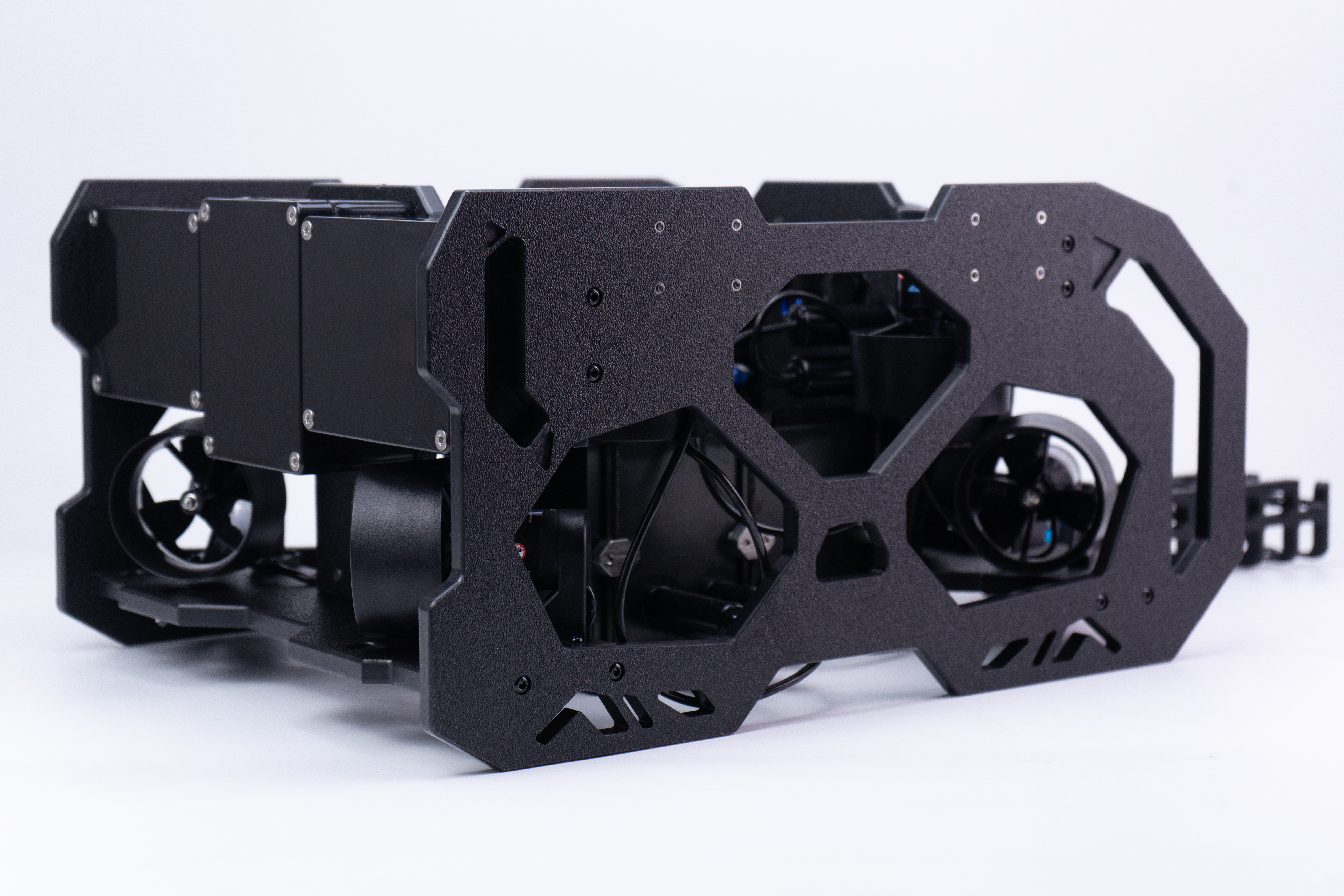
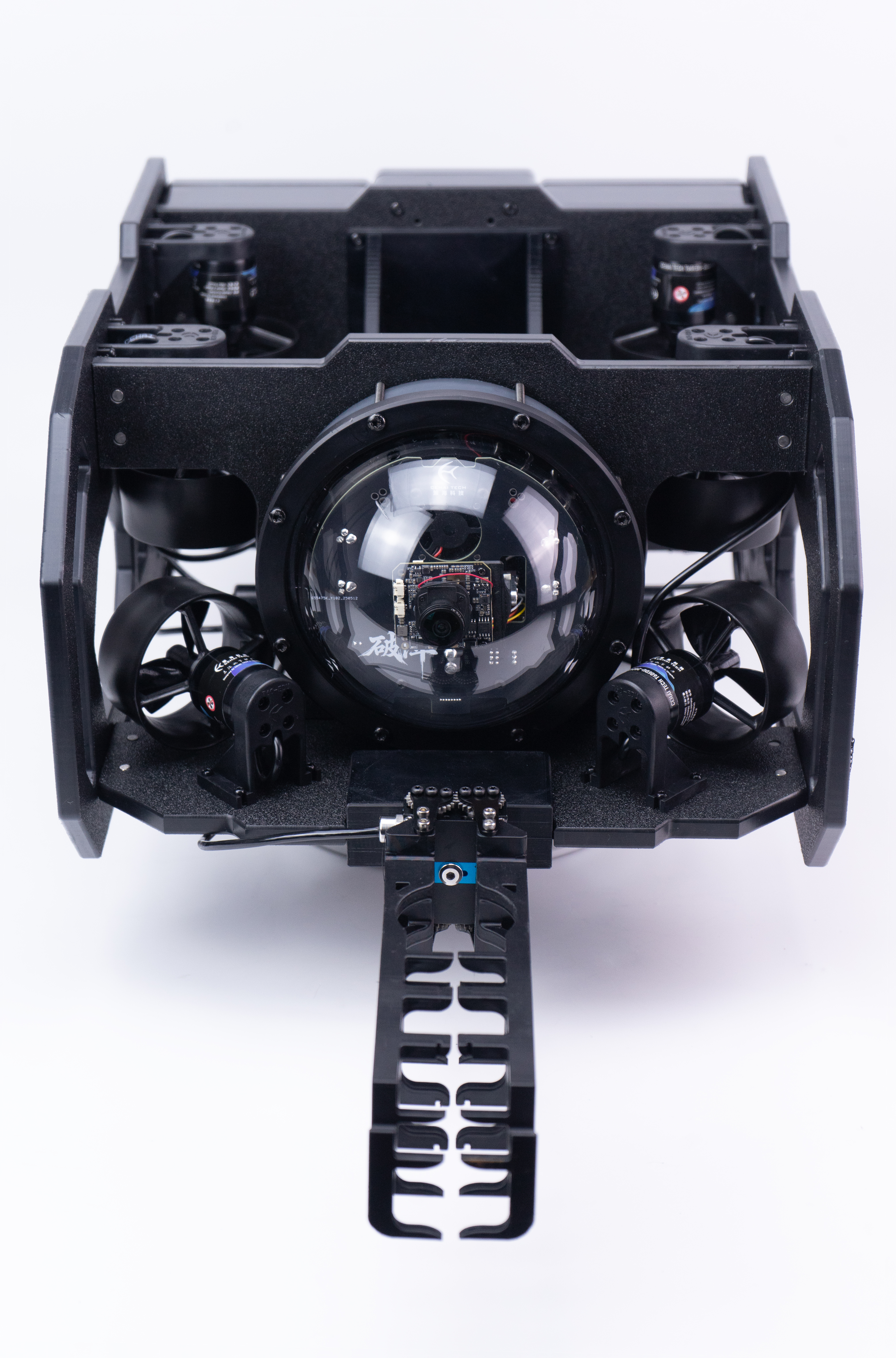
The design is compact and light in weight. It supports full-degree-of-freedom six-push and eight-push layouts, and dual-mode switching. The full-degree-of-freedom eight-push can be reduced to full-degree-of-freedom six-push in the "battle damage" state to continue fighting.
Abdominal cabin opening design, onshore power supply, no endurance problem, hidden metal cabin, water-cooled heat dissipation, no fear of device heating, smaller water resistance and larger carrying space, plug-in screw insertion scheme, easy to quickly replace propeller alone and mode switch metal cabin screw electric adjustment scheme, propeller is smaller, but its strength is not reduced!




本作品版权归 期颐 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。

新用户?创建账号
登录 重置密码
请输入电子邮件以重置密码。


Gear wire all exposed, sure practical?
It's kind of like something RMer could come up. Another question, the product as an underwater device, waterproof performance how to guarantee?
really good
6666
This is too advanced